1. Введение
В данном техническом отчёте приводятся следующие результаты:
Первые четыре результата приведены для одного набора данных. Данные обрабатывались после миссии, чтобы реализовать необходимый сценарий проверки (в том числе эмуляцию работы в реальном времени).
2. Описание траекторий движения для первых четырех результатов
Движение происходило в условиях города на легковом автомобиле и длилось от 10 до 30 минут. На большинстве проездов также присутствовала стоянка в начале продолжительностью около 10 минут. Ниже на графиках представлены траектории и профили скорости для всех 8 проездов. Проезды именуются по номеру дня и номеру проезда ("лога") в этот день.








3. Проверка точности определения углов ориентации
Для оценки точности определения углов ориентации системой Acrux было проведено сравнение с решением, полученным с помощью высокоточного инерциального измерительного блока Оптолинк БЧЭ 501.
3.1. Методика сравнения
При сравнении решения двух инерциальных навигационных систем нужно иметь ввиду, что оси этих систем никогда не будут идеально совпадать. Это означает, что разность углов ориентации будет содержать постоянное и неизвестное смещение. Чтобы его оценить и сравнить углы ориентации в абсолютном смысле, нужно провести серию экспериментов при фиксированном закреплении инерциальных измерительных блоков. Именно такой подход использовался в нашем сравнении.
Сравнение было проведено следующим образом:
-
Решение Acrux было получено в режиме обычной эксплуатации в реальном времени: использовалось 2 антенны и спидометр, автомобильная модель движения, были доступны поправки типа RTCM3 с близлежащей базовой станции
-
Решение по Оптолинку было получено с помощью стандартного алгоритма объединения измерений ИИБ и позиционных решений (стандартной точности) навигационного приемника (метод “слабой интеграции”). Более никаких данных или ограничений на движение не использовалось. Это позволило получить решение независимое от решения Acrux
-
Временная синхронизация решения обеспечивалась привязкой измерений Оптолинк к системному времени Acrux
-
Использовались 8 наборов данных записанных в течении 5 дней
-
По этим данным были оценены смещения углов ориентации за счет несоосности блоков и далее были проанализированы скомпенсированные разности углов
3.2. Характеристика ИИБ Оптолинк БЧЭ 501
Инерциальный измерительный блок Оптолинк БЧЭ 501 имеет следующие характеристики датчиков:
-
Гироскопы:
-
среднеквадратичное значение смещения нуля при включении - 0.03 °/час
-
шум - 0.003 °/√час
-
нестабильность смещения нуля - 0.003 °/час на временах порядка часа
-
-
Акселерометры:
-
среднеквадратичное значение смещения нуля при включении - 0.002 м/с2
-
шум - 0.003 м/с/√час
-
нестабильность смещения нуля - 0.001 м/с2 на временах порядка часа
-
Параметры шума и стабильности были оценены по методике дисперсии Аллана и примерно соответствует заявляемым производителем. Эти параметры использовались в модели ИИБ для получения решения.
Решение, полученное с помощью ИИБ Оптолинк, имеет ожидаемую среднеквадратичную точность не хуже, чем:
-
0.01° по крену и тангажу
-
0.05° по курсу
Заявленная точность Acrux же следующая:
-
0.05° по крену и тангажу
-
0.15° по курсу
Т. к. точность решения с помощью ИИБ Оптолинк превосходит точность решения Acrux в 3 или более раз, то по принципам метрологии оно может выступать в качестве эталонного. Из этого мы и исходим в дальнейшем.
3.3. Графики разности углов ориентации
Для всех 8 наборов проездов были посчитаны разности углов ориентации между решением Acrux и решением с помощью ИИБ Оптолинк. Для приведения решений к одинаковым моментам времени использовалась интерполяция ориентации типа SLERP.
Ниже представлены графики разности углов ориентации. Черными пунктирными линиями отмечены моменты времени, после которых считается, что решения достигли оптимальной точности (“сошлись”). Эти значения были выбраны в данном случае "на глаз" по виду графиков разности.








По этим графикам можно сделать следующие выводы:
-
Разность стабилизируется по прошествии некоторого времени. Это связано главным образом с тем, что оптимальная точность Acrux достигается в процессе движения
-
Средняя разность между углами приблизительно совпадает на всех логах
-
Разности углов тангажа и крена более стабильны, чем разности угла курса. Это объясняется принципом оценки этих углов, оценки тангажа и крена точнее и стабильней в принципе во всех системах инерциальной навигации
3.4. Количественная оценка точности
Для оценки точности Acrux было проделано следующее:
-
Были посчитаны средние разности углов на каждом логе после того, как решения "сошлись". Смещения для углов крена, тангажа и курса за счет несоосности ИИБ были определены, как средние значений за каждый проезд
-
Временные серии разностей в каждом проезде были скомпенсированы на вычисленные смещения (путем вычитания)
-
Были вычислены среднеквадратичные значение разностей после компенсации, как характеристика точности
На графике ниже представлены средние значения разностей углов:

Оценки смещения углов за счет несоосности блоков, как средние представленных значений, получились следующими:
-
0.63° по крену
-
1.06° по тангажу
-
-0.83° по курсу
Среднеквадратичные значения разностей углов ориентации после компенсации указанных смещений изображены на графике:

3.5. Вывод
На всех проездах среднеквадратичные разности после компенсации несоосности не превосходили:
-
0.04° по крену и тангажу
-
0.12° по курсу
А общее среднеквадратичное значение (как среднеквадратичное от значений в каждый проезд) оказалось следующим:
-
0.032° по крену (заявленная 0.05°)
-
0.036° по тангажу (заявленная 0.05°)
-
0.094° по курсу (заявленная 0.15°)
Данные числа свидетельствуют о том, что система Acrux обеспечивала заявленную точность по определению углов ориентации транспортного средства.
4. Проверка точности одометрического решения
Под одометрическим решением понимается решение, полученное с помощью инерциального измерительного блока и одометрического датчика (спидометра, одометра). Прибор выдает одометрическое решение при пропаже сигналов ГНСС (туннели, закрытые парковки и т. п.)
4.1. Методика оценки точности
Ошибка одометрического решения нарастает по мере движения транспортного средства и обычно характеризуется, как процент от пройденного расстояния. Скорость роста ошибки зависит от начальной ошибки ориентации, точности оценки параметров ИИБ и вообще корректности моделирования его ошибок, способа обработки информации.
Проверка была организована следующим образом:
-
Использовались данные записанные при движении автомобиля в условиях города, которые включали ИИБ, ГНСС, курс, получаемый по двум антеннам, измерения скорости из CAN-шины автомобиля и поправки RTCM3 с близлежащей базовой станции
-
Эталонная траектория была получена, как решение Acrux с использованием всей доступной информации
-
Для оценки точности одометрии сигналы ГНСС отключались (включая курс с помощью двух антенн) после прохождения половины времени лога. То есть первую половину времени система работает в обычном режиме и оценивает свои параметры, а далее работает в одометрическом режиме, где используется только ИИБ и измерения скорости
-
Ошибки одометрии вычисляются, как разности эталонной и одометрической траекторий после отключения сигналов ГНСС
4.2. Графики одометрической ошибки
Для каждого проезда были посчитаны одометрические ошибки, как разности координат одометрической и эталонной траекторий после отключения сигналов ГНСС. Графики начинаются с середины времени лога в момент пропажи ГНСС сигналов и перехода системы в одометрический режим. В этот момент одометрическая ошибка равняется нулю. Также на графиках изображены \$\pm 1 \sigma\$ границы точности решения, выдаваемые навигационным фильтром Acrux.








По этим графикам можно сделать следующие выводы:
-
Ошибки укладываются в \$\pm 1 \sigma\$ границы с запасом или не выходят за них существенно. Это говорит о консистентном поведении фильтра и достаточно консервативном подходе к оценке точности решения
-
Скорость роста вертикальной ошибки существенно меньше скорости роста горизонтальных ошибок, что объясняется более высокой точностью оценок углов крена и тангажа по сравнению с точностью оценки угла курса
4.3. Количественная оценка точности
В качестве характеристики точности были вычислены средние относительные горизонтальные и вертикальные ошибки. Под относительной ошибкой понимается ошибка, делённая на пройденное расстояние после момента пропажи ГНСС сигналов. Горизонтальная ошибка вычисляется, как корень из суммы квадратов ошибок в северном и восточных направлениях. Усреднение производится для расстояний больше 100 метров, дабы исключить случайные колебания относительной ошибки при малых значениях знаменателя (пройденного расстояния).
На графике ниже представлены указанные средние ошибки в %:

4.4. Вывод
На всех проездах одометрические ошибки не превосходили:
-
0.9% для горизонтальной
-
0.1% для вертикальной
Медианные значения оказались следующими:
-
0.17% для горизонтальной (заявленное значение 0.5%)
-
0.03% для вертикальной
Результаты (количественные и графики) свидетельствуют о достаточно точной и консистентной работе Acrux в режиме одометрии. Это является косвенным подтверждением того, что система получает оценки углов ориентации консистентные с их предсказанной точностью и спецификацией системы.
5. Постобработка: улучшение одометрического решения
Сигналы ГНСС обычно пропадают на некотором ограниченном участке траектории: например, когда автомобиль проезжает туннель. В этом случае, до и сразу после имеется точное позиционное решение.
В режиме постобработки алгоритм оптимизации “сшивает” точки до и после пропажи ГНСС сигналов, используя одометрические измерения, при этом точность решения по сравнению с режимом работы в реальном времени может существенно улучшиться.
5.1. Графики одометрической ошибки
Используется следующий сценарий обработки данных: ГНСС сигналы отключаются на 50% времени лога и включаются вновь на 95% времени лога. Тем самым моделируется ситуация пропажи ГНСС на участке траектории с последующим восстановлением.
Ниже приведены графики позиционных ошибок и стандартные отклонения, выдаваемые алгоритмом, с начала пропажи сигналов ГНСС:








По этим графикам можно заметить следующее:
-
Согласно графикам СКО, одометрическая ошибка достигает максимума где-то в середине интервала пропажи сигналов ГНСС. Это можно понять интуитивно, рассмотрев процесс интегрирования в обратном по времени направлении, начиная с момента восстановления ГНСС.
-
Использование постобработки (оптимизации) позволяет получить одометрического решение сопоставимое со стандартной точностью ГНСС приемников (2-3 метра) на интервалах времени превышающих 15 минут
-
На логе day_2_log_1 решение после восстановления ГНСС получилось не слишком точным и консистентным. Это связано с непродолжительным отрезком приема ГНСС в конце проезда в неблагоприятными условиях (отсутствие движения и отражения ГНСС сигналов). Поэтому на конечном отрезке решение типа RTK_FIXED не определяется, а решение типа RTK_FLOAT оказалось смещенным.
5.2. Сравнение с решением в режиме фильтра
Для режима фильтра результаты в почти аналогичном сценарии приведены в предыдущем разделе. Стоит отметить, что на данном наборе логов фильтр в одометрии обычно давал результаты существенно лучше средних ожидаемых. Наиболее существенное уменьшение ошибки в режиме постобработки можно продемонстрировать для лога day_5_log_1. Для него графики ошибок с границами СКО приведены ниже:

На графиках видно, что ожидаемые пиковые горизонтальные ошибки (СКО) уменьшаются приблизительно в 10 раз, а реальные ошибки (на данном конкретном логе) уменьшилась еще более существенно.
5.3. Вывод
Режим оптимизации в постобработке позволяет кардинально изменить свойства одометрического решения при пропаже ГНСС сигналов и уменьшить его ошибку на порядок или более. Это является одним из наиболее впечатляющих и полезных свойств алгоритма оптимизации для постобработки логов.
6. Постобработка: компенсация кратковременной потери ГНСС сигнала с RTK
В этом разделе рассматривается сценарий с периодической пропажей ГНСС сигнала на 10 и 60 секунд. Отключения ГНСС производятся приблизительно с момента начала и движения с периодичностью 60 секунд. На протяжении всей траектории доступны данные RTCM3 c близлежащей базовой станции, автомобильный профиль движения и данные спидометра.
На графиках ниже приводится разности координат между оптимизационными решениями с отключением и без отключения ГНСС, а также \$\pm 1 \sigma\$ оценки точности, выдаваемые алгоритмом. Промежутки отключения ГНСС можно идентифицировать по увеличению \$\pm 1 \sigma\$ границ точности.
6.1. Пропажа ГНСС на 10 секунд
Ниже приведены графики, когда ГНСС отключался на 10 секунд.








По этим графикам можно сделать вывод, что пропажа ГНСС на 10 секунд в целом оставляет точность решения в сантиметровом диапазоне. В промежутках присутствия ГНСС решения совпадают в границах точности. В промежутках пропажи ГНСС ошибка решения возрастает до 2-5 см.
6.2. Пропажа ГНСС на 60 секунд
Ниже приведены графики, когда ГНСС отключался на 60 секунд.








Здесь мы можем наблюдать, что в промежутки пропажи ГНСС горизонтальные координаты отклоняются типично на 10-30 см. В двух логах на начальном этапе стоянки происходит смещение решение, которое выходит за ожидаемый диапазон, однако остается в пределах 10 см.
6.3. Вывод
При наличии коррекций RTCM3 для движения автомобиля с использованием данных спидометра можно ожидать следующую точность позиционного решения при пропаже данных ГНСС:
-
При пропаже на 10 секунд точность решения будет в пределах нескольких сантиметров
-
При пропаже на 60 секунд точность решения будет в пределах 20-30 сантиметров
Нужно иметь ввиду, что результаты получены в сценарии моделирования, когда данные ГНСС вне промежутков выключения не подвержены никакой дополнительной деградации. В реальных условиях нужно смотреть также на качество (С/N0, количество) доступных сигналов.
7. Постобработка: работа в условиях помех сигналам ГНСС
В этом разделе приводится отчет по использовании постобработки (режим processing_mode: optimization) для получения решения в условиях помех сигналам ГНСС.
Они характеризуется в среднем пониженным соотношением сигнал/шум, а также нерегулярными сильными его падениями с существенным или катастрофическим увеличением шума всех измеряемых величин.
В некоторые промежутки времени сигналы ГНСС полностью пропадают.
Приводятся результаты за три проезда с использованием разных типов антенн, одометрическая информация не использовалась, информация о курсе с двухантенной подсистемы была недоступна из-за плохого сигнала.
7.1. Характеристики принимаемых сигналов ГНСС
Изменение характеристики сигналов ГНСС во времени изображены на графиках ниже:



Для антенны типа ФАР можно отметить, что число сигналов примерно в два раза меньше (т. к. она принимает сигналы только в диапазоне L1), однако при её использовании “просадок” и полных потерь сигнала меньше. Между двумя другими антеннами принципиальной разницы не наблюдается.
В таких условиях использование RTK не имеет смысла, тем более невозможно проверить точность и корректность такого решения.
Поэтому постобработка запускалась с настройкой rtcm_mode: off.
7.2. Построение решения на карте
Единственным способом проверить точность позиционного решения в таких условиях является наложение на карту, что было проделано в программе QGIS с использованием слоя Open Street Maps. Ниже приведены три таких изображения со следующими пояснениями:
-
изображен примерно один и тот же пространственный район, в котором условия приема ГНСС были наихудшими
-
точки решения разделены по временем интервалом 2 секунды
-
области полной пропажи ГНСС можно идентифицировать по оранжевым точкам, помеченными, как “Acrux DEAD_RECKONING”
-
изображения можно увеличить по щелчку мыши

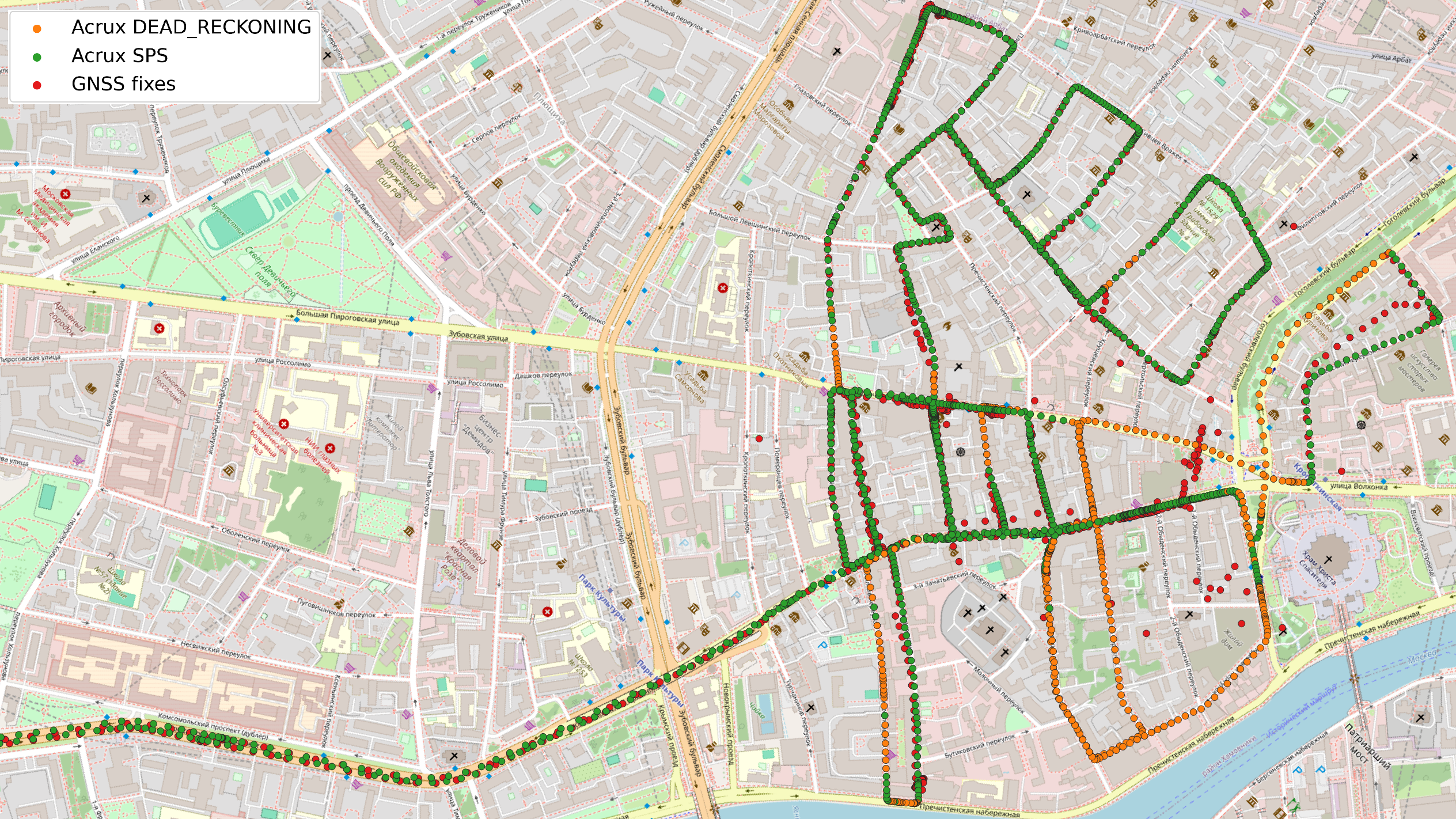
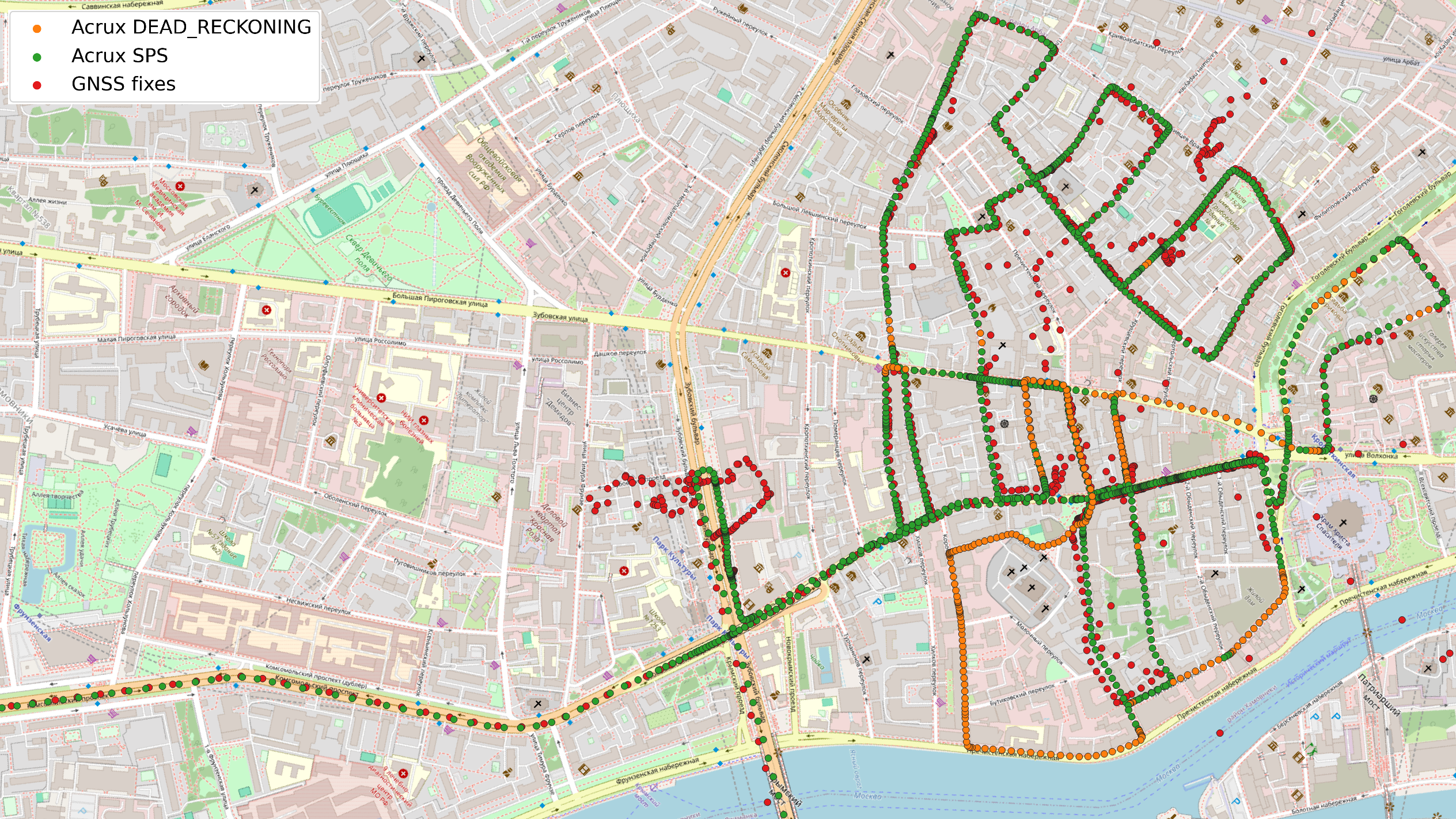
Сложность условий приема ГНСС можно понять по хаотическому поведению и пропажи решения внутреннего приемника (красные точки). Также можно увидеть, что решения Acrux в постобработке по крайней мере качественно отражает движения и вписывается в контуры улиц. Также из-за принципа получения решения, оно оказывается гладким и лишенным любых “нефизичных” скачков или перестроений. При детальном анализе поведения решения относительно слоя карты, можно оценить максимальную ошибку решения, как 10 метров.
7.3. Сравнение с решением реального времени
Результаты работы Acrux в реальном времени можно оценить, как условно в 2-3 раза хуже в смысле максимального отклонения позиции. Также решение реального времени неминуемо подвержено скачкообразным коррекциям в моменты восстановления сигналов ГНСС. Чтобы оставить изображения карт и траекторий читаемыми, результаты такого решения не приводятся.
7.4. Вывод
Постобработка навигационных данных Acrux позволяет получить решение приемлемой точности (ошибка менее 10 метров на всей траектории) в условиях помех сигналам ГНСС. Для реализации точной навигации в таких условиях требуется либо использовать высокоточные и дорогостоящие ИИБ и одометр, либо привлечение измерений, основанных на других принципах и подходах (компьютерное зрение, лазерное сканирование). Навигационное решение типа ГНСС/ИНС в этом случае необходимо для получения хорошей начальной оценки геолокации.
8. Анализ работы системы на легком вертолете
В данном разделе приводятся результаты, характеризующие особенности работы и эффективность системы для определения навигационных параметров легкого вертолета. Для такого типа транспортного средства был реализован специальный профиль движения “HELICOPTER”.
При типичной эксплуатации движение вертолета можно охарактеризовать следующим образом:
-
Движение достаточно плавное, без существенных ускорений, в том числе на этапе взлета.
-
Вертолет сохраняет приблизительно горизонтальную ориентацию, однако углы крена и тангажа могут достигать до 30 градусов.
-
Нет жесткой связи между ориентацией корпуса вертолета и направлением движения: возможны вертикальный взлет и посадка, движение боком или задом, либо какие-то промежуточные варианты.
-
При достаточно высокой скорости можно однако предполагать, что вертолет осуществляет стандартный горизонтальный полет, когда его скорость приблизительно направлена вдоль продольной оси.
Эти особенности были учтены в профиле движения “HELICOPTER”. Самым существенным является возможность определения начальной ориентации, для чего предусмотрено два способа:
-
При получении измерений с системы определения курса с помощью двух антенн.
-
Кинематическим образом при условии движения с достаточно высокой скоростью.
Учитывая типично низкую динамку вертолета, общей рекомендацией будет использование двух антенн.
8.1. Описание траектории движения
Тестовый пролёт был проведен в зимнее время на полигоне на малой высоте. Вид траектории, профили высоты и скорости, а также углы ориентации изображены на рисунке ниже.

Изображенные параметры траектории были получены в режиме постобработки данных. Система была подключена к двум антеннам, разнесенным на расстояние 2 метра. Информация о скорости движения (тип сообщения “DMI”) была недоступна. Во время проведения испытаний поправки с базовой станции типа RTCM3 в систему не поступали.
8.2. Постобработка с использованием данных с базовой станции
Для постобработки были привлечены ГНСС измерения в формате RINEX с базовой станции, которая располагалась на расстоянии 36 км от места испытаний. Эта возможность позволяет получить высокоточное ГНСС решение даже если в реальном времени поправки в систему не поступали.
В качестве демонстрации возможностей и пользы постобработки в режиме “optimization” сравниваются решения при использовании данных со второй антенны и без них. Без использования второй антенны в фильтре реального времени начальный курс может быть определен только примерно на 250 секунде, в постобработке решение будет доступно на всем интервале записи данных.
На рисунках ниже изображены полученный тип позиционного решения, разность полученных решений и их номинальное СКО выдаваемое алгоритмом.


По этим графикам можно заметить следующее:
-
На большей части временного промежутка решение имело статус “RTK_FIXED”, что является хорошим результатом при расстоянии до базовой станции в 36 км. Первые 10 секунд решение имеет статус “DEAD_RECKONING”, поскольку измерения ГНСС не были доступны в первые моменты времени после включения ГНСС приемника.
-
Значимое отличие в решениях наблюдается только для углов тангажа и курса, поскольку измерения вектора между двумя антеннами (при использованной установке вдоль продольной оси) позволяют дополнительно наблюдать именно эти углы ориентации. В целом эти разности не противоречат выдаваемой точности.
-
Выигрыш от использования двух антенн для точности определения угла курса достаточно существенный, что объясняется низкой динамикой движения вертолета.
-
Остальные переменные определяются одинаково с одной или двумя антеннами
8.3. Сравнение результатов постобработки с результатами реального времени
На графиках ниже приведены разности решения режима обработки, имитирующего реальное время с одной и двумя антеннами, и оптимизационного решения c двумя антеннами. Данные RTCM3 в решение типа реального времени не использовались.


Здесь можно отметить следующее:
-
Полноценное решение с одной антенной становится доступным только около 250 секунды при достижении вертолетом достаточно высокой скорости.
-
Точность позиционного решения — около 0.7 метра в горизонтальной плоскости и 2 метра по вертикали.
-
Отклонение горизонтальной скорости выглядит более шумным чем указывает линия СКО. Отчасти это связано с видом графика, на котором визуально выделяются именно максимальные отклонения, но в целом ситуация требует более внимательного рассмотрения.
-
Отклонение углов ориентации в целом разумно укладываются в ожидаемые и выдаваемые значения СКО.
8.4. Вывод
Продемонстрированы возможности системы Acrux для определения навигационных параметров вертолета в режимах постобработки и реального времени с использованием двух и одной антенны. Сравнение результатов в разных режимах по крайней мере косвенно подтверждают заявленную точность определения навигационных параметров и в целом устойчивость работы системы на вертолете с использованием профиля движения “HELICOPTER”.